Lowrance/Simrad StructureScan 3D er ingen nyhet, produktet ble sluppet pĺ markedet allerede i 2015 og Erik har skrevet flere artikler om SS3D her pĺ bloggen tidligere.
Nĺ har det seg likevel slik at undertegnede for tiden har en SS3D-giver og -modul montert i bĺten for ĺ teste ut noe som kanskje ikke sĺ mange har gjort fřr. I flere ĺr har vi kunnet logge dybder med SS3D-giveren i sl3-formatet, men det har ikke vćrt noen mulighet for ĺ benytte selve 3D-dataene i verken Reefmaster eller C-Map Genesis selv om disse er lagret i sl3-filen. Hva som er grunnen til dette er for meg ukjent, men noen tanker om dette kommer senere i artikkelen. Faktum er at dataene ligger i filen og med rette kompetansen er det mulig ĺ hente ut denne informasjonen.
Formĺlet med denne artikkelen er dog ikke ĺ vise hvordan man fĺr ut dataene fra sl3-filen, men snarere ĺ vise hvordan disse dataene ser ut, hva de kan benyttes til og hvilken kvalitet de har. Jeg kommer derfor ikke til ĺ skrive mye om hvordan dataene er hentet ut, men jeg kan rřpe at jeg har fĺtt hjelp av en meget kunnskapsrik kar ved navn Alex Sidorov. Alex har utviklet en software som konverterer disse datene til csv (kommaseparert filformat). Han driver forřvrig med veldig mye annet spennende ogsĺ og hvis du vil ta en titt sĺ finner du Youtubekanalen hans her.
Selve StructureScan 3D pakka bestĺr av en giver og en modul som behandler signalene fra giveren. Min gamle LSS2 giver har seks elementer i seg (to til downscan og to for hver side til sidescan). SS3D-giveren derimot har hele 8 elementer som da enkelt forklart kan sende og motta "strĺler/ekko" fra flere vinkler enn f.eks. LSS2 og kan derfor ogsĺ kalles et "multistrĺleekkolodd". De ulike ekkoene trianguleres og tolkes av selve SS3D-modulen slik at det tegnes opp et tredimensjonalt bilde pĺ ekkoloddet ditt. SS3D er forřvrig kompatibelt med Simrad NSS Evo2 og nyere enheter samt Lowrance HDS Gen 3 og nyere enheter. Teoretisk rekkevidde for SS3D er ca. 100m dybde og 200m ut til hver side, altsĺ hele 400m bredde (en fordobling kontra LSS-2). Dette mĺ vi dog anta at er under helt ideelle forhold. Jeg opplever forelřpig at rekkevidden ut til sidene er ca. 5-6 ganger dybden, men dette vil som sagt variere etter vannforholdene. Erik har tidligere lagt ut bilder som viser rekkevidde opp mot 11 ganger dybde, men da under helt ideelle forhold.
Selve monteringen av giveren og modulen er beskrevet pĺ denne bloggen tidligere, men jeg legger likevel ut et par bilder som viser plassering pĺ akterspeilet.
Nĺr SS3D-modulen er installert og koblet til nettverket i bĺten vil det dukke opp et nytt valg i hovedmenyen pĺ NSS/HDS enheten din. Selve 3D visningen er intuitiv og enkel ĺ betjene og man har bare et begrenset antall parametere ĺ justere pĺ. Et av disse er forsterkning av dybde, dvs. mulighet for ĺ gange opp dybden med en gitt faktor for ĺ "overdrive" dybdeforskjeller. Jeg slo denne funksjonen av for ĺ fĺ et mest mulig reelt bilde av bunnen under bĺten.
Selve testingen ble utfřrt pĺ Drammenselva en kald dag i midten av november ved normal vannstand og rolige forhold. Jeg valgte ĺ kjřre frem og tilbake over samme omrĺde flere ganger slik at jeg kunne ta ut data bĺde fra tradisjonell logging og 3D-skanningen og sammenligne disse mot hverandre. I tillegg kunne jeg da sammenligne data fra de ulike turene over samme omrĺdet. Jeg var pĺ forhĺnd veldig spent pĺ bĺde rekkevidde og kvalitet pĺ downscan/sidescan og kan med en gang bekrefte at det er et stort steg opp pĺ begge omrĺder fra min gamle LSS2-giver. Bildet er kanskje ikke like detaljrikt som pĺ den nye Active Imaging giveren, mens rekkevidden nok er hakket bedre.
Det vi skal gjřre nĺ er ĺ sammenligne dataene vi fĺr ut fra "tradisjonell" loggdata med dataene fra 3D-scanningen vi har utfřrt med SS3D. Vi bruker samme sl3-filen (som inneholder begge datasettene) slik at strekningen som er kjřrt i elva her 100% identisk. Strekningen som er kjřrt er pĺ ca. 700m og jeg har kjřrt nćrme land pĺ babord side, dybden varierer fra 4-6m.
Vi starter med vanlig "2d-sonar".
Data fra 2D-loggingen gir oss 1553 loggpunkter fordelt pĺ 700m. Bredden er teoretisk kun en liten stripe rett under bĺten, punktene er fordelt over en bredde pĺ ca. 30-50cm.
Sĺ ser vi pĺ samme loggfilen, men denne gangen har vi tatt ut data fra SS3D-loggingen fra sl3-formatet og konvertert til csv. Bildet under viser "punktskyen" av SS3D-loggingen vist i 3D i verktřyet "CloudCompare" som er et gratis nedlastbart program.
Tar vi dataene videre inn i Reefmaster ser det slik ut:
Som bildet over tilsier sĺ har vi denne gangen fĺtt ut flere loggpunkter pĺ samme strekningen. Faktisk gir SS3D-loggdataene oss hele 422661 punkter pĺ samme strekningen. Punktene er fordelt over en bredde som i dette tilfellet varierer fra 30-50m. Siden jeg kjřrte ganske nćre land pĺ babord side sĺ kunne jeg lett logget enda bredere om jeg hadde holdt meg midt i elva. Resultatet er altsĺ ganske enkelt veldig imponerende. Ved ĺ bruke data fra SS3D-loggingen sĺ fikk jeg i dette tilfelle altsĺ hele 280 ganger flere loggpunkter ĺ jobbe med!
Bruker jeg disse punktene til ĺ generere dybdekart i Reefmaster med hovedkoter pĺ 1m og mellomkoter pĺ 0,25m fĺr jeg fřlgende resultat:
Som vi ser av bildene over her sĺ ligger det et stort potensiale i ĺ kunne bruke data fra SS3D til ĺ lage dybdekart. Dette kartet er som sagt laget basert pĺ punkter fra étt pass over omrĺdet. Jeg har altsĺ i lřpet av 6 minutters kjřring data til ĺ lage dybdekart for en strekning pĺ 700m i 30-50m bredde.
Sĺ er det lett ĺ spřrre seg, hvorfor er det ikke ĺpnet for import av denne type data i Reefmaster og C-Map Genesis direkte via sl3-formatet? Vel, selv om undertegnede ikke kjenner til bakgrunnen for dette sĺ er det lov ĺ spekulere. Alt er nemlig ikke sĺ enkelt som man skulle tro.
Hvis man skal ĺpne for bruk av denne type data sĺ er man avhengig av at dataene er av en viss kvalitet, dvs. at man kan stole pĺ at punktene man fĺr er innenfor en viss toleranse. De střrste utfordringene her er "rulling" av bĺten, bĺde i lengderetning og sideveis ved f.eks. břlger eller at man selv skaper bevegelser i bĺten ved ĺ flytte rundt pĺ seg samt "vandrende" kompassretning og unřyaktig GPS-posisjon. Nĺr man har en "skannestrĺle" som potensielt kan vćre f.eks. 50-100m bred sĺ sier det seg selv at selv smĺ bevegelser i bĺten vil gi store utslag, jo lenger ut fra siden pĺ bĺten man kommer jo střrre blir utslagene. Selv om man har et Precision 9 kompass i bĺten sĺ finnes det sĺvidt jeg vet ingen funksjon for ĺ kompensere for "rulling" i SS3D-modulen. Jeg vet at Simrad NSS Evo2/3 serien har sĺkalt "heave compensation" (břlgekompensasjon), men jeg har ikke klart ĺ finne om dette ogsĺ gjelder data fra SS3D-modulen. Det betyr at man er avhengig av ĺ ha helt flatt vann og minimalt med bevegelser i bĺten for at loggdataene skal vćre noenlunde konsekvente og uten for store avvik.
Som jeg nevnte innledningsvis sĺ kjřrte jeg flere "pass" i samme omrĺde, nettopp for ĺ kunne sammenligne data fra de ulike loggfilene for ĺ kunne si noe om hvor konsistente loggdataene fra SS3D er og hvor mye de ulike loggfilene avviker fra hverandre. Bildene under viser samme loggfil som tidligere sammenlignet med en ny loggfil hvor jeg har kjřrt en parallell rute tilbake i samme omrĺde.
Nĺr jeg kombinerer dataene og mĺler avvik sĺ kan jeg bekrefte at, jo, dataene blir faktisk mer avvikende jo lenger bort fra bĺten man kommer. Selv om vannet pĺ elva var rolig denne dagen sĺ er det likevel relativt lite bevegelse av bĺten som skal til fřr man fĺr avvik. I tillegg til rulling sĺ er det ogsĺ faktorer som avvik i selve kompassretningen kombinert med avvik i GPS-posisjon som spiller inn her uten at jeg kan gĺ nćrmere inn pĺ konkrete tall, til det har jeg ikke fĺtt testet nok enda. En annen ting er at SS3D har en meget stor konevinkel, faktisk hevdes det at den er helt opp mot 180 grader. Dette er veldig bra nĺr man leter etter fisk og strukturer pĺ grunt vann, men er ikke ideelt nĺr formĺlet er ĺ logge dybde. En kunne kanskje derfor řnske seg ĺ kunne velge en smalere konebredde i fremtiden, Furuno sin DFF-3D kjřrer f.eks. pĺ en lavere frekvens og har en mye smalere konebredde med sine 120 grader.
Likevel, basert pĺ mine egne datasett sĺ vil jeg si at selv med de begrensninger som er listet opp over sĺ er potensialet i dataene fra SS3D store. Sĺ er det med dette som med mye annet, resultatet du fĺr ut avhenger veldig av det du putter inn, "shit in, shit out" rett og slett. Det betyr at du skal ha relativt god peiling pĺ hva du driver med, ha gode forhold pĺ vannet, minimalt med břlger samt ha et godt kalibrert kompass og en meget nřyaktig GPS-posisjon for ĺ fĺ dataene konsistente. Og nettopp dette er nok grunnen til at det fortsatt ikke er ĺpnet for denne type data i Reefmaster og C-Map Genesis forelřpig, men man kan jo hĺpe og tro at denne střtten kommer etterhvert.
Jeg kommer til ĺ fortsette ĺ teste SS3D gjennom vinteren dersom det lar seg gjřre ĺ komme seg utpĺ innimellom, og det er ikke utenkelig at det kommer en oppfřlgingsartikkel om dette temaet neste ĺr.
Läs mer pĺ bloggen
Nĺ har det seg likevel slik at undertegnede for tiden har en SS3D-giver og -modul montert i bĺten for ĺ teste ut noe som kanskje ikke sĺ mange har gjort fřr. I flere ĺr har vi kunnet logge dybder med SS3D-giveren i sl3-formatet, men det har ikke vćrt noen mulighet for ĺ benytte selve 3D-dataene i verken Reefmaster eller C-Map Genesis selv om disse er lagret i sl3-filen. Hva som er grunnen til dette er for meg ukjent, men noen tanker om dette kommer senere i artikkelen. Faktum er at dataene ligger i filen og med rette kompetansen er det mulig ĺ hente ut denne informasjonen.
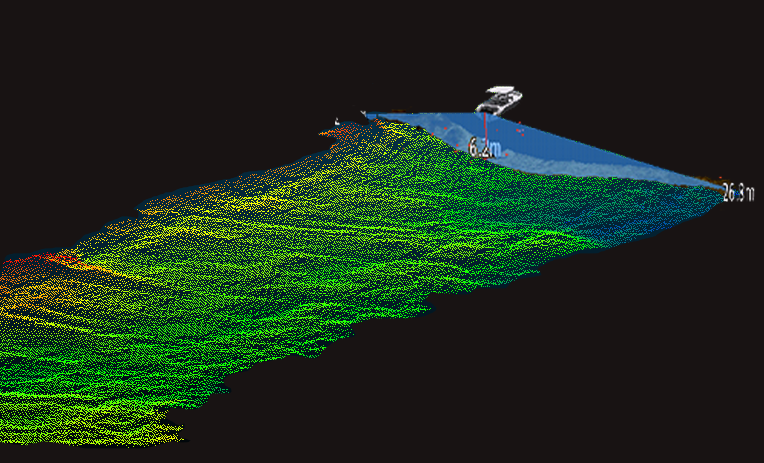 |
| Illustrasjonsbilde, dybdelogging med StructureScan 3D. |
Selve StructureScan 3D pakka bestĺr av en giver og en modul som behandler signalene fra giveren. Min gamle LSS2 giver har seks elementer i seg (to til downscan og to for hver side til sidescan). SS3D-giveren derimot har hele 8 elementer som da enkelt forklart kan sende og motta "strĺler/ekko" fra flere vinkler enn f.eks. LSS2 og kan derfor ogsĺ kalles et "multistrĺleekkolodd". De ulike ekkoene trianguleres og tolkes av selve SS3D-modulen slik at det tegnes opp et tredimensjonalt bilde pĺ ekkoloddet ditt. SS3D er forřvrig kompatibelt med Simrad NSS Evo2 og nyere enheter samt Lowrance HDS Gen 3 og nyere enheter. Teoretisk rekkevidde for SS3D er ca. 100m dybde og 200m ut til hver side, altsĺ hele 400m bredde (en fordobling kontra LSS-2). Dette mĺ vi dog anta at er under helt ideelle forhold. Jeg opplever forelřpig at rekkevidden ut til sidene er ca. 5-6 ganger dybden, men dette vil som sagt variere etter vannforholdene. Erik har tidligere lagt ut bilder som viser rekkevidde opp mot 11 ganger dybde, men da under helt ideelle forhold.
 |
| Slik ser utstyret ut. |
 |
| Plassering av givere pĺ min Ibiza 20 Sport. TM260 pĺ babord side, SS3D og TM150 pĺ styrbord side. |
 |
| SS3D og TM150 er plassert med fĺ centimeters mellomrom, SS3D litt lavere for ĺ unngĺ at TM150 skygger for strĺlen. |
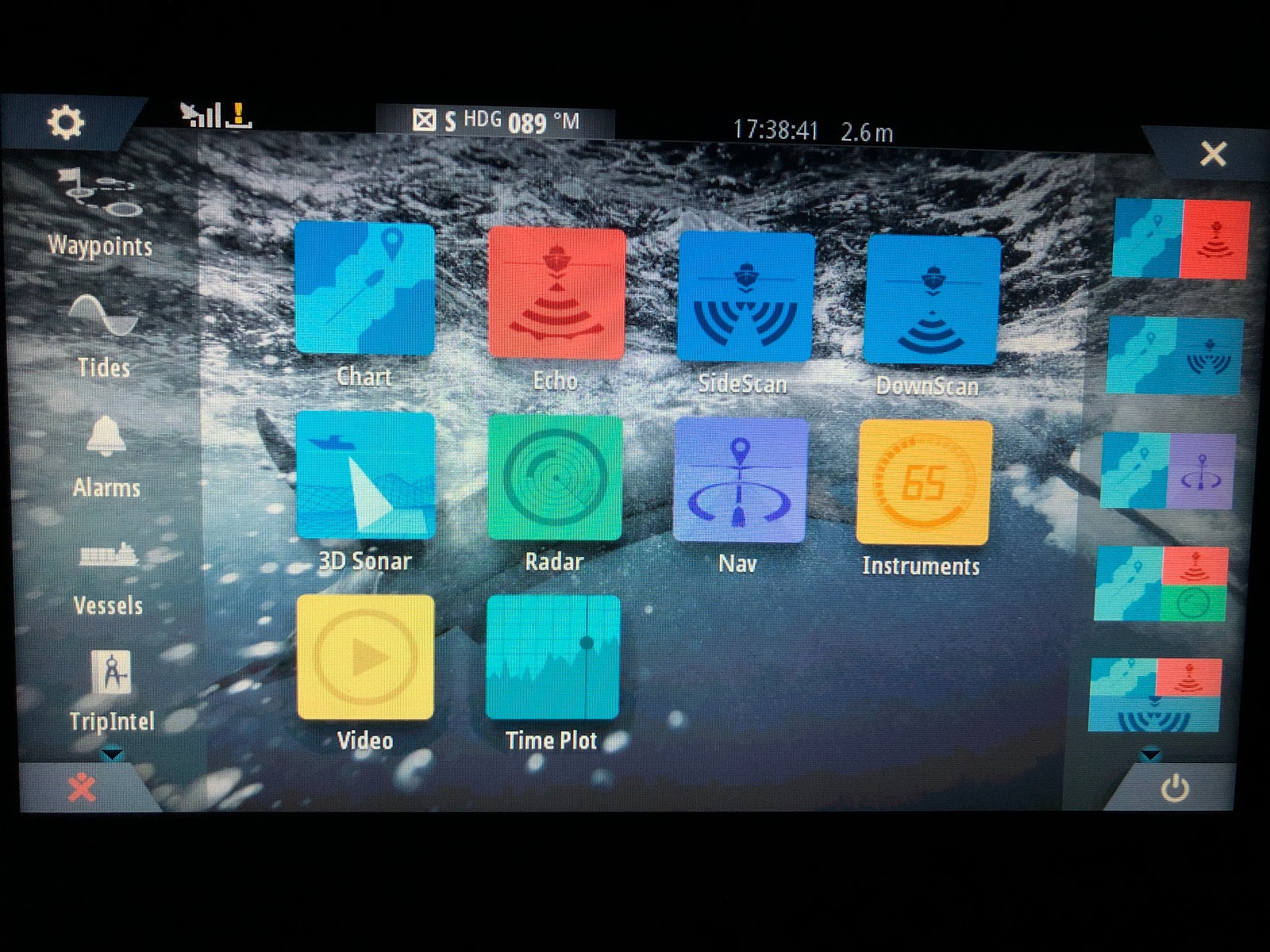 |
| Hjemskjermen pĺ min Simrad NSS9 Evo2 etter inkludering av SS3D-modulen i nettverket. |
 |
| Skjermdump fra loggingen med SS3D. |
 |
| Eksempel pĺ sidescanbilde fra SS3D. Til hřyre ser man pelene til et bryggeanlegg og skyggene til disse. Sort omrĺde til hřyre er land. |
Vi starter med vanlig "2d-sonar".
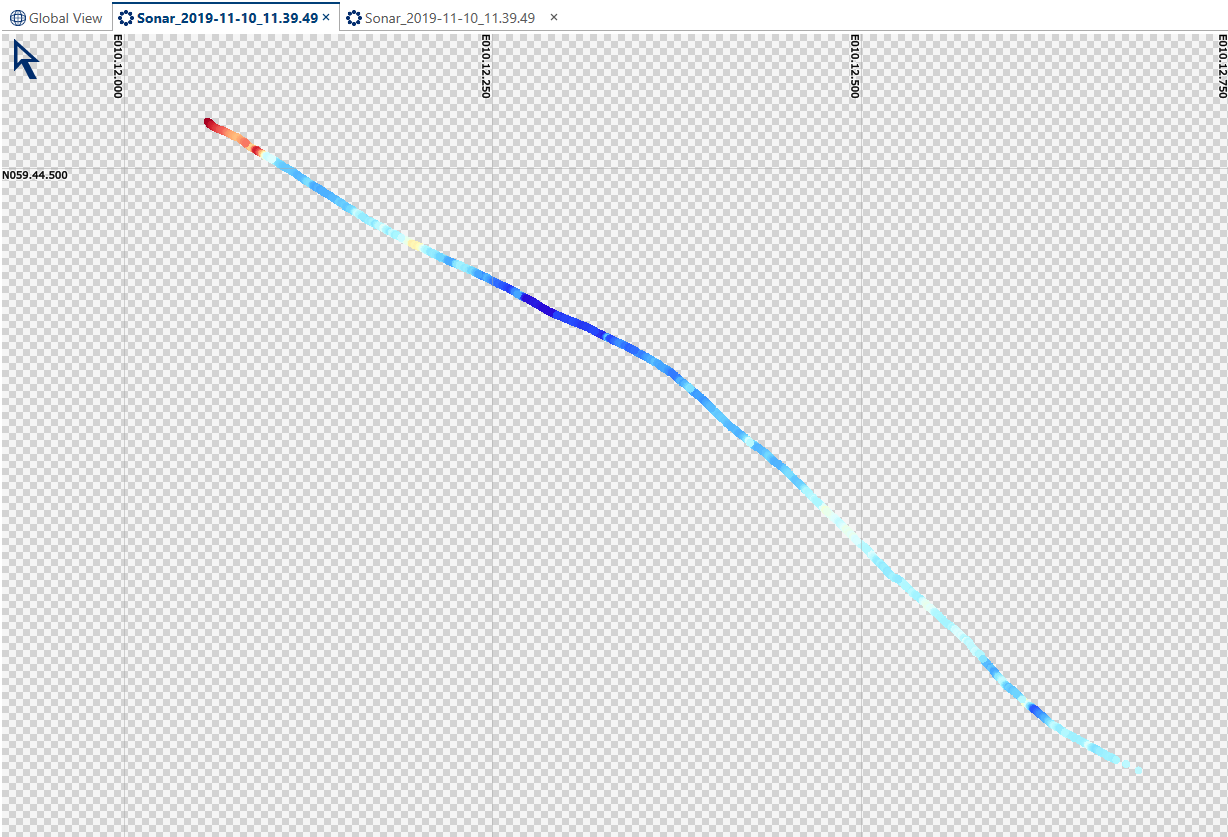 |
| Bildet viser den "tradisjonelle" loggfilen av en utvalgt strekning i Drammenselva etter import i Reefmaster. |
Sĺ ser vi pĺ samme loggfilen, men denne gangen har vi tatt ut data fra SS3D-loggingen fra sl3-formatet og konvertert til csv. Bildet under viser "punktskyen" av SS3D-loggingen vist i 3D i verktřyet "CloudCompare" som er et gratis nedlastbart program.
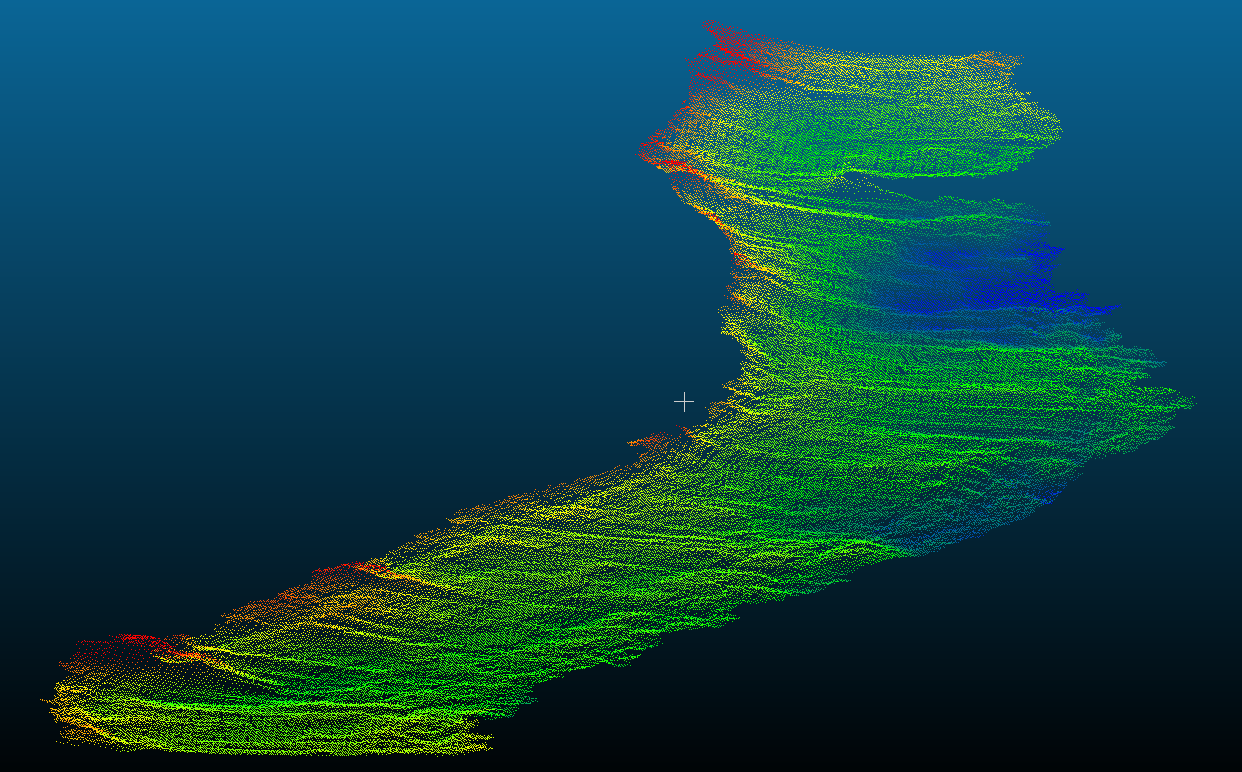 |
| SS3D loggdata vist i verktřyet CloudCompare. |
 |
| Bildet viser SS3D-loggdaene av samme strekning i Drammenselva etter import i Reefmaster. |
Bruker jeg disse punktene til ĺ generere dybdekart i Reefmaster med hovedkoter pĺ 1m og mellomkoter pĺ 0,25m fĺr jeg fřlgende resultat:
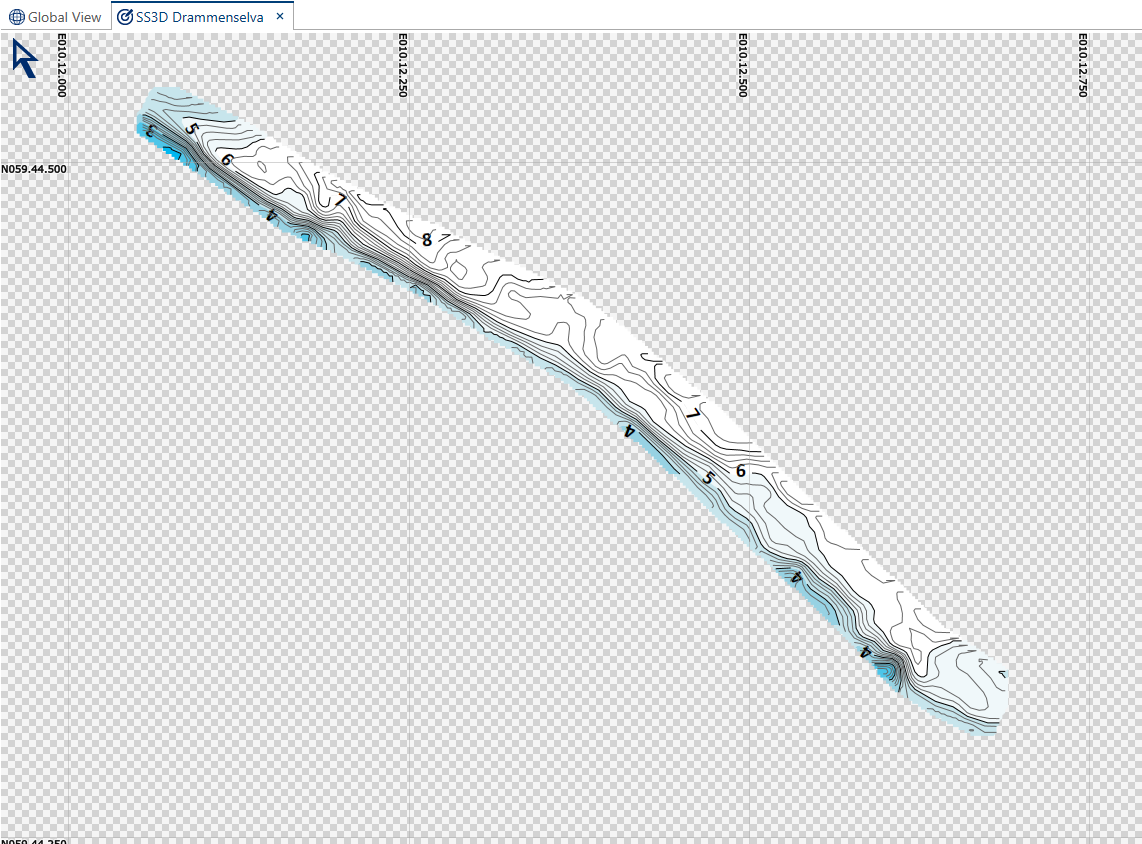 |
| Data fra SS3D (én rute) behandlet i Reefmaster. Hovedkoter pĺ 1m og mellomkoter pĺ 0,25m. |
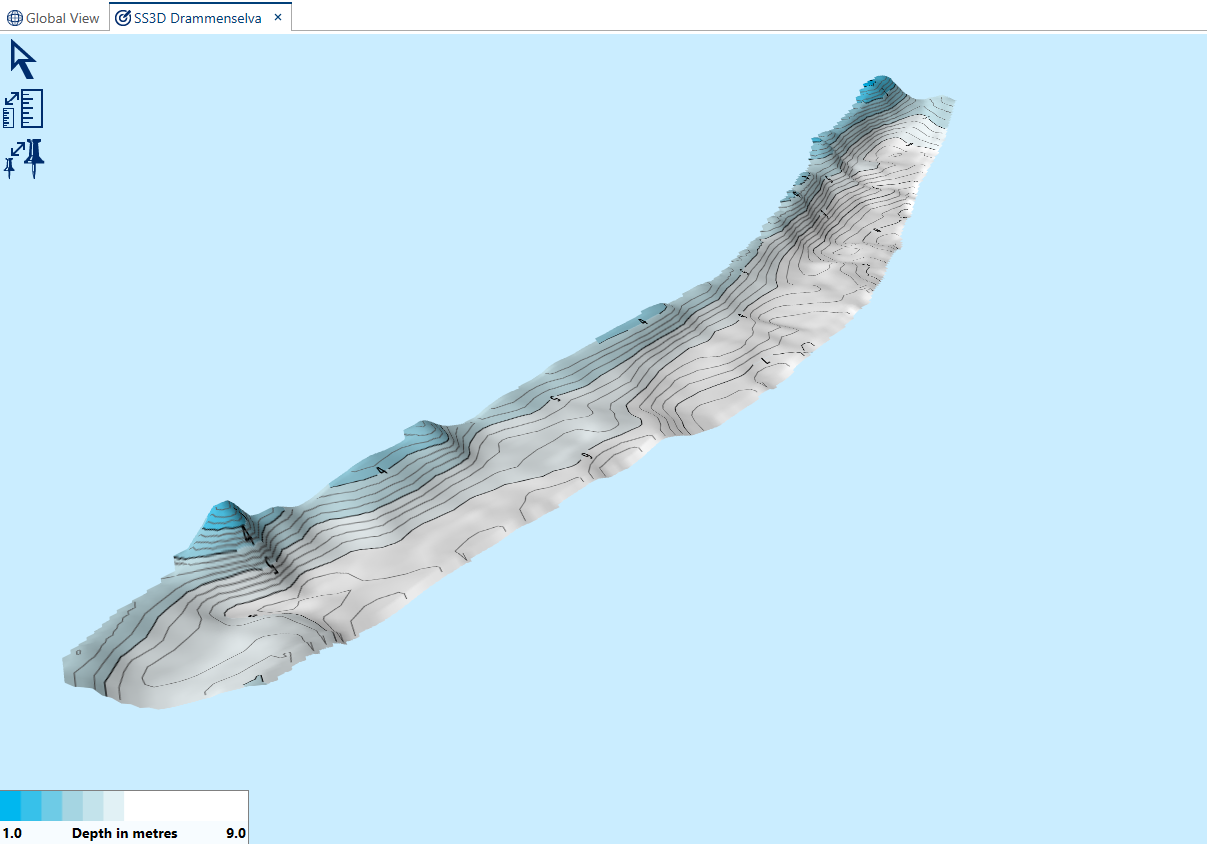 |
| Her er samme dybdekartet vist i 3D med vertikal forsterkning (overdrivelse av dybdekotene). |
Sĺ er det lett ĺ spřrre seg, hvorfor er det ikke ĺpnet for import av denne type data i Reefmaster og C-Map Genesis direkte via sl3-formatet? Vel, selv om undertegnede ikke kjenner til bakgrunnen for dette sĺ er det lov ĺ spekulere. Alt er nemlig ikke sĺ enkelt som man skulle tro.
Hvis man skal ĺpne for bruk av denne type data sĺ er man avhengig av at dataene er av en viss kvalitet, dvs. at man kan stole pĺ at punktene man fĺr er innenfor en viss toleranse. De střrste utfordringene her er "rulling" av bĺten, bĺde i lengderetning og sideveis ved f.eks. břlger eller at man selv skaper bevegelser i bĺten ved ĺ flytte rundt pĺ seg samt "vandrende" kompassretning og unřyaktig GPS-posisjon. Nĺr man har en "skannestrĺle" som potensielt kan vćre f.eks. 50-100m bred sĺ sier det seg selv at selv smĺ bevegelser i bĺten vil gi store utslag, jo lenger ut fra siden pĺ bĺten man kommer jo střrre blir utslagene. Selv om man har et Precision 9 kompass i bĺten sĺ finnes det sĺvidt jeg vet ingen funksjon for ĺ kompensere for "rulling" i SS3D-modulen. Jeg vet at Simrad NSS Evo2/3 serien har sĺkalt "heave compensation" (břlgekompensasjon), men jeg har ikke klart ĺ finne om dette ogsĺ gjelder data fra SS3D-modulen. Det betyr at man er avhengig av ĺ ha helt flatt vann og minimalt med bevegelser i bĺten for at loggdataene skal vćre noenlunde konsekvente og uten for store avvik.
Som jeg nevnte innledningsvis sĺ kjřrte jeg flere "pass" i samme omrĺde, nettopp for ĺ kunne sammenligne data fra de ulike loggfilene for ĺ kunne si noe om hvor konsistente loggdataene fra SS3D er og hvor mye de ulike loggfilene avviker fra hverandre. Bildene under viser samme loggfil som tidligere sammenlignet med en ny loggfil hvor jeg har kjřrt en parallell rute tilbake i samme omrĺde.
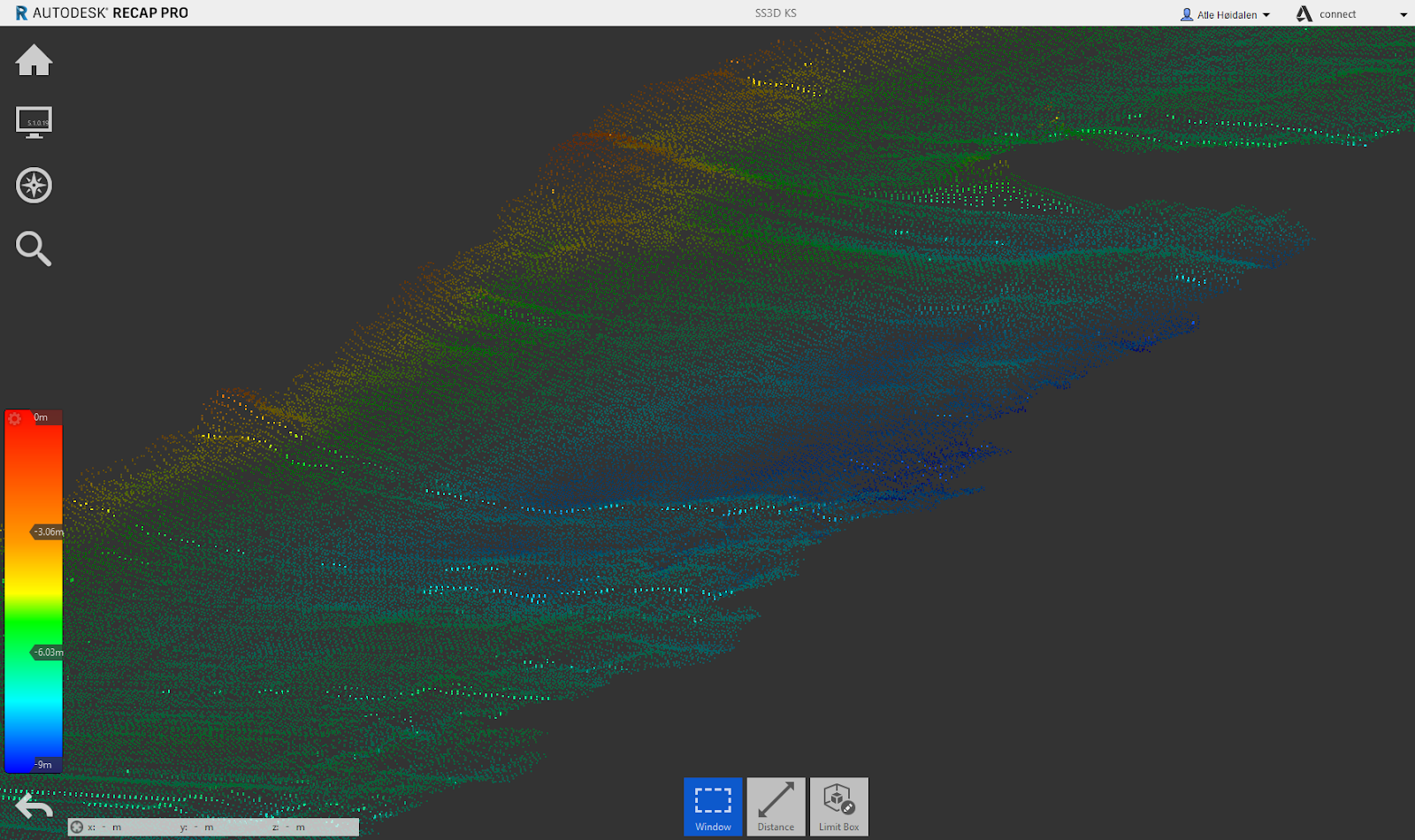 |
| Samme loggfil som tidligere, importert i Recap Pro. |
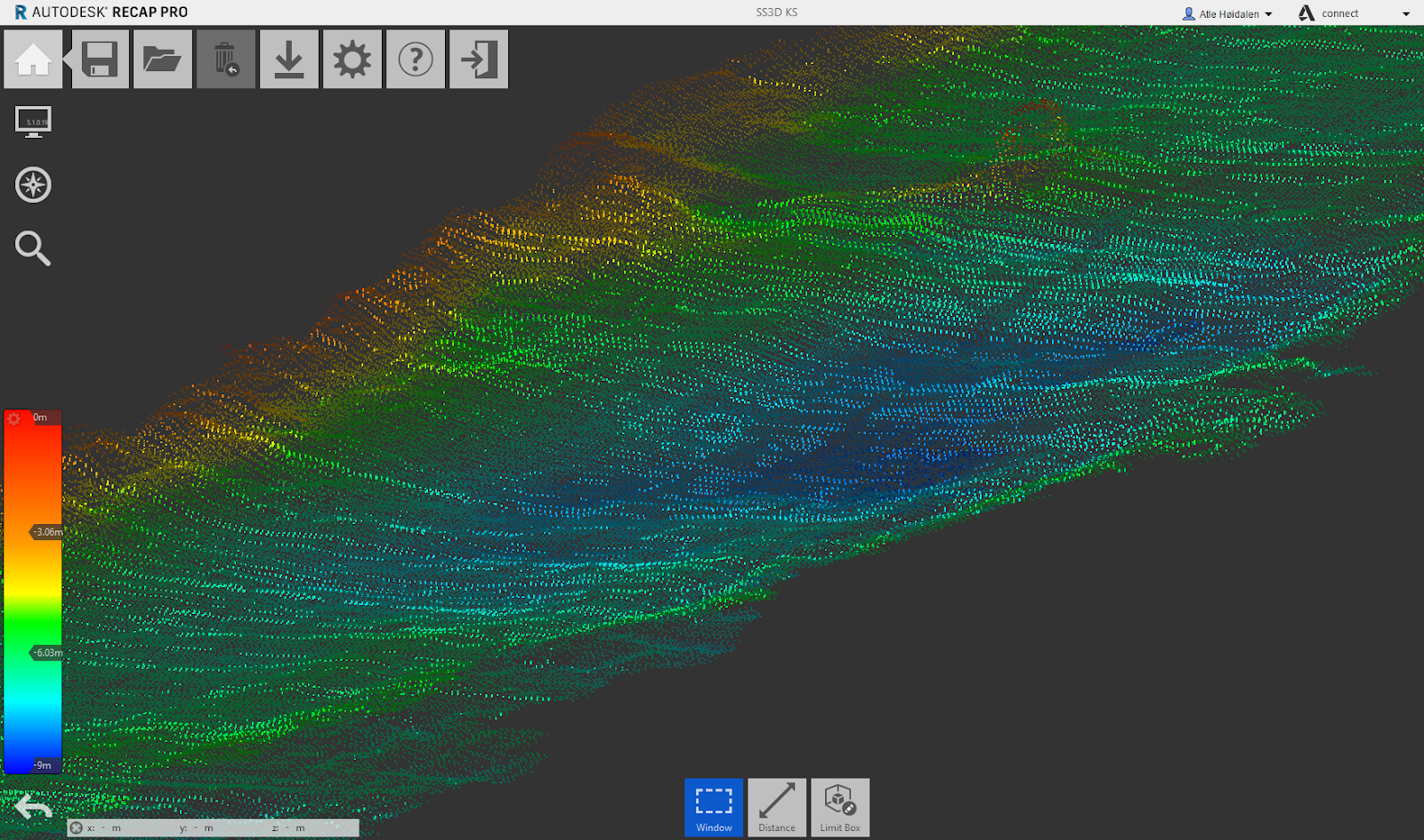 |
| Tidligere brukt loggfil sammen med ny loggfil med en litt annen rute i samme omrĺde. |
Likevel, basert pĺ mine egne datasett sĺ vil jeg si at selv med de begrensninger som er listet opp over sĺ er potensialet i dataene fra SS3D store. Sĺ er det med dette som med mye annet, resultatet du fĺr ut avhenger veldig av det du putter inn, "shit in, shit out" rett og slett. Det betyr at du skal ha relativt god peiling pĺ hva du driver med, ha gode forhold pĺ vannet, minimalt med břlger samt ha et godt kalibrert kompass og en meget nřyaktig GPS-posisjon for ĺ fĺ dataene konsistente. Og nettopp dette er nok grunnen til at det fortsatt ikke er ĺpnet for denne type data i Reefmaster og C-Map Genesis forelřpig, men man kan jo hĺpe og tro at denne střtten kommer etterhvert.
Jeg kommer til ĺ fortsette ĺ teste SS3D gjennom vinteren dersom det lar seg gjřre ĺ komme seg utpĺ innimellom, og det er ikke utenkelig at det kommer en oppfřlgingsartikkel om dette temaet neste ĺr.
Läs mer pĺ bloggen